制作小车都用raspberry pi上的口有些麻烦,所以把一些基础控制给51单片机解决,raspberry pi控制高层应用。所以测试一下raspberry pi串口连接调试51单片机。
第一步:
sudo apt-get install python-serial
sudo easy_install pyserial
第二部接线部分图
raspberry pi板子串口接线图
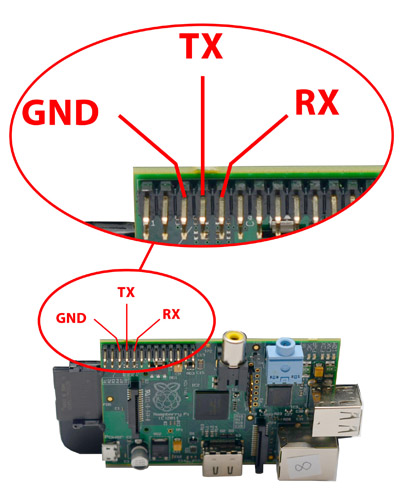
raspberry 串口接线图1
杜邦线连接

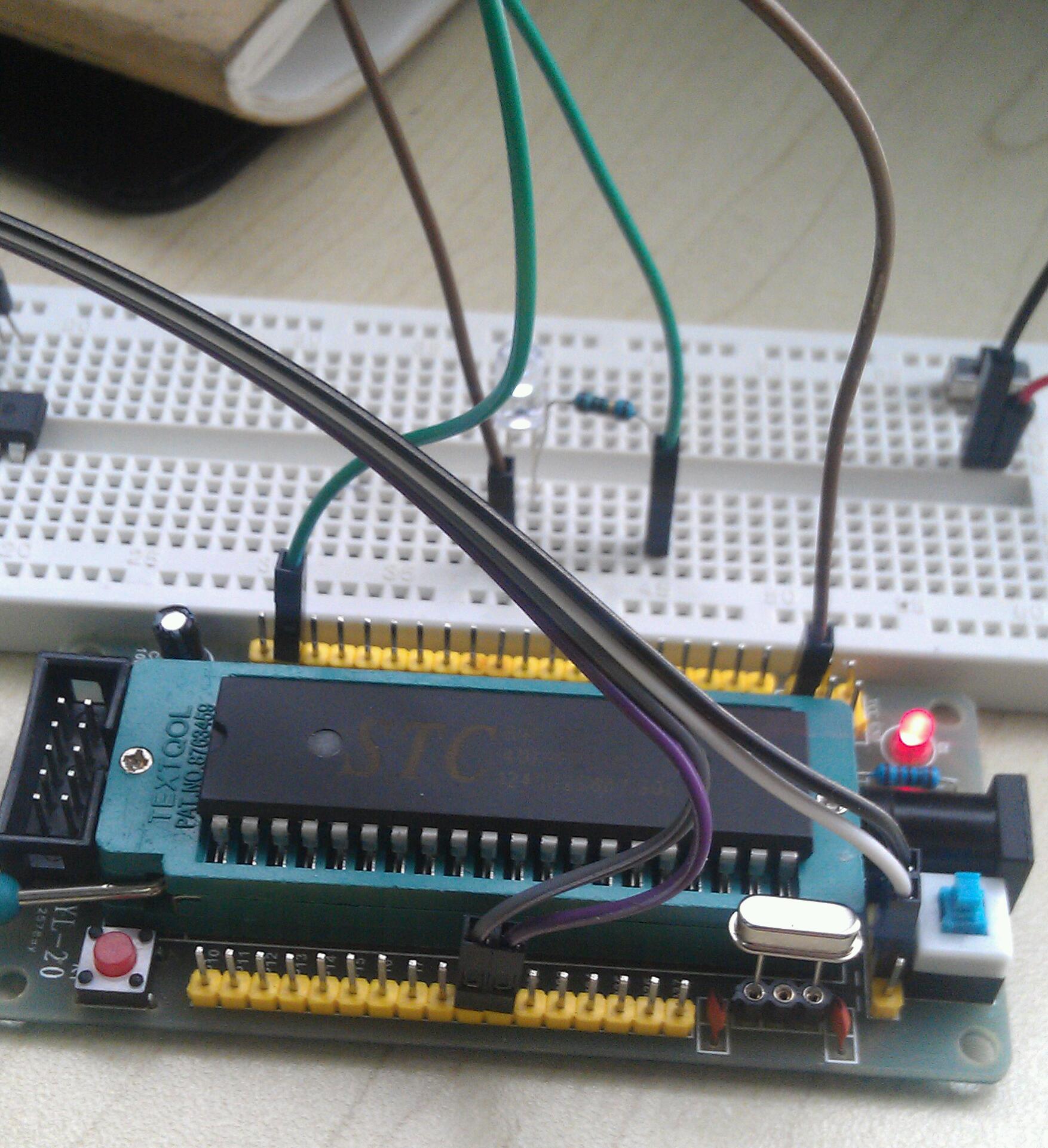
raspberry 串口接线图3
代码部分
raspberry pi python串口控制代码
#!/bin/env python
# -*- coding:utf-8 -*-
# -------------------------------
# Filename:
# Revision:
# Date: 2013-02-5
# Author: simonzhang
# Email: simon-zzm@163.com
# WWW: www.simonzhang.net
# -------------------------------
import serial
import time
#### 定义小灯亮灭初始值
i = 0
#### 实例化串口
ser = serial.Serial('/dev/ttyAMA0', 9600, timeout = 0.5)
for j in range(10):
if ser.isOpen() == False:
ser.open()
#### 每次循环对上值次取反
if i == 0:
i = 1
else:
i = 0
#### 向串口发送字符
ser.write(chr(i))
#### 获取串口返回值
#### linux为福阻塞模式,在阻塞模式下
#### 会报错,所以抱起来就好了。
try:
re = ser.readlines()
except:
pass
print re
time.sleep(2)
51单片机代码
#include#include typedef unsigned char uint8; typedef unsigned int uint16; uint8 num; sbit D0 = P0^0; void init() { SCON = 0x50; TMOD = 0x20; TH1 = 0xFD; TL1 = 0xFD; TR1 = 1; //打开定时器 ES = 1; EA = 1; //打开总开关 } void interrupt_uart() interrupt 4 { if(TI) { TI = 0; REN = 1; } if(RI) { RI = 0; num = SBUF; if (num == 1) { D0 = 0; SBUF = 0; } else { D0 = 1; SBUF =1; } REN = 0; } } main() { init(); while(1); }
源码下载
raspberrypito51