买了51最小的单片机和PL2303的烧录线。安装驱动没有问题,我安装在win7上操作。
烧录程序过程:
先安装驱动。先连好VCC(红线)、RXD(绿线)、TXD(白线)、GND(黑线),接好usb安装驱动。看到系统中有连接的com口。

将红线拔掉,启动烧录程序。等到显示“仍在连接中, 请给 MCU 上电…”时将红线插上,就开始烧录了。
如报错如下:
仍在连接中, 请给 MCU 上电…
MCU Type is: STC12C5A60S2
MCU Firmware Version: 6.2I
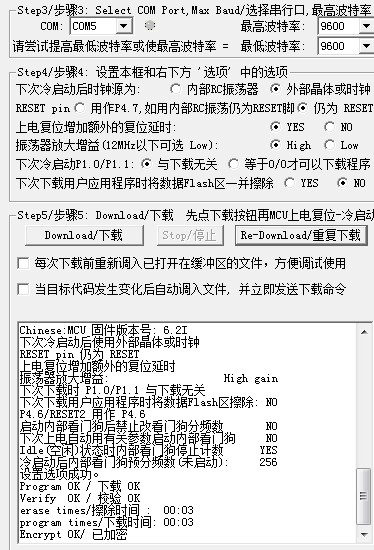
Chinese:MCU 固件版本号: 6.2I
下次冷启动后使用外部晶体或时钟
RESET pin 仍为 RESET
上电复位增加额外的复位延时振荡器放大增益: High gain
下次下载时 P1.0/P1.1 与下载无关
下次下载用户应用程序时将数据Flash区擦除: NO
P4.6/RESET2 用作 P4.6
启动内部看门狗后禁止改看门狗分频数 NO
下次上电自动用有关参数启动内部看门狗 NO
Idle(空闲)状态时内部看门狗停止计数 YES
冷启动后内部看门狗预分频数(未启动): 256
MCU Clock:11.07831MHz./时钟频率:11.07831M.
Chinese:正在重新连接 …
Connection failed. / 握手失败 (End: 12:03:54)
解决方案需要将波特率都改为9600即可,如图。
PL2303烧录STC12C5A60S2单片机
还需要注意两个地方。一、STC-ISP烧录软件使用管理员权限启动。二,烧录的时候不要给板子加电。芯片只连PL2303线即可。




