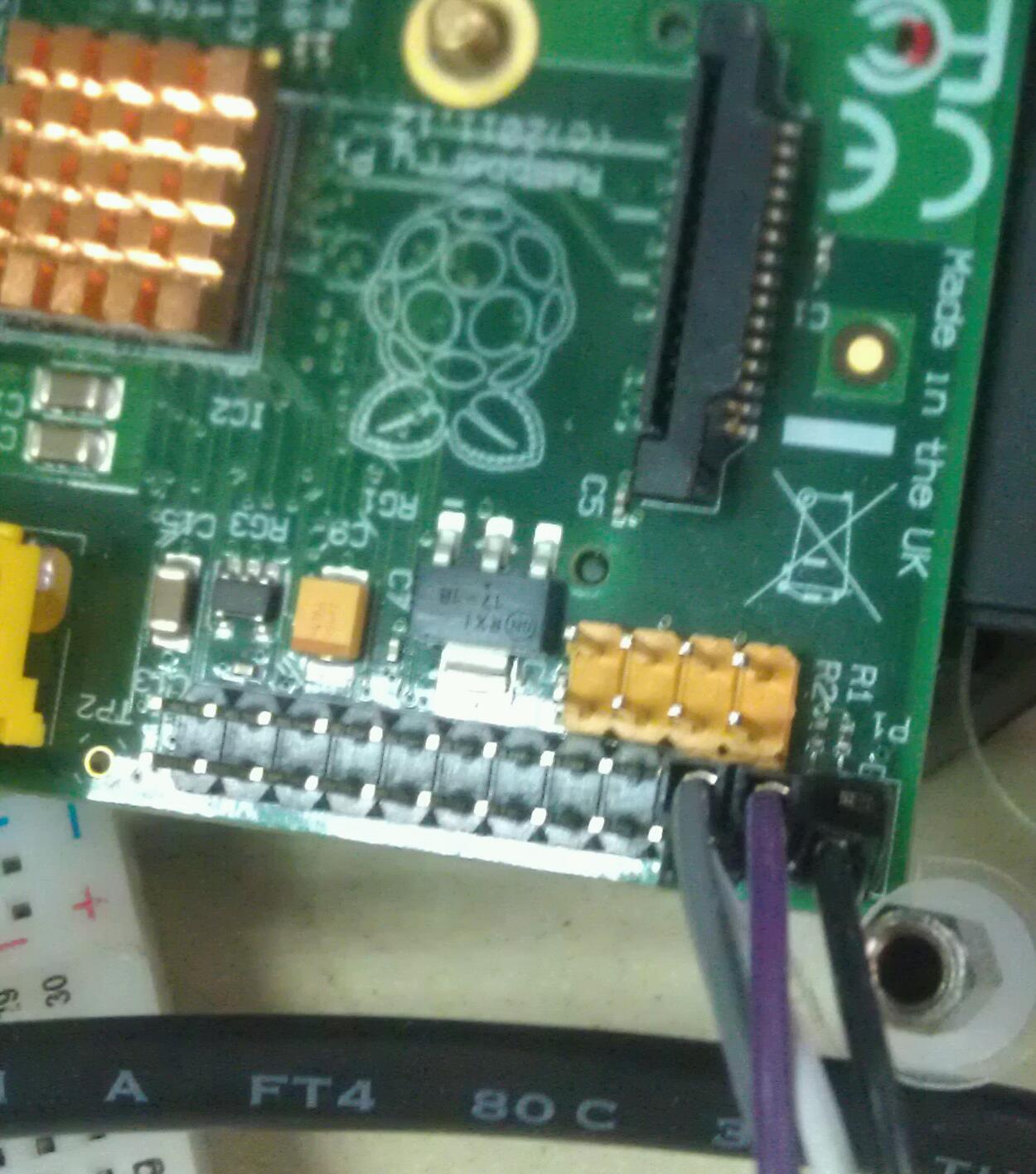
连接线图。
raspberry pi 使用mpu 6050三轴加速度 陀螺仪模块

raspberry pi 使用mpu 6050三轴加速度 陀螺仪模块
安装工具
sudo apt-get install -y python-smbus i2c-tools
编辑文件
$sudo vim /etc/modules
内容如下
i2c-bcm2708
i2c-dev
$vim /etc/modprobe.d/raspi-blacklist.conf
内容如下,直接注释掉
#blacklist spi-bcm2708
#blacklist i2c-bcm2708
测试一下
512M Pi’s use i2c port 1, 256M ones use i2c port 0!
pi@raspberrypi ~ $ sudo i2cdetect -y 1
0 1 2 3 4 5 6 7 8 9 a b c d e f
00: — — — — — — — — — — — — —
10: — — — — — — — — — — — — — — — —
20: — — — — — — — — — — — — — — — —
30: — — — — — — — — — — — — — — — —
40: — — — — — — — — — — — — — — — —
50: — — — — — — — — — — — — — — — —
60: — — — — — — — — 68 — — — — — — —
70: — — — — — — — —
一切正常。地址68在代码中会用到。源码如下。
#! /usr/bin/python
# -*- coding:utf-8 -*-
# Revision:
# Date: 2013-08-16
# Author: simonzhang
# Email: simon-zzm@163.com
# Web: www.simonzhang.net
# -------------------------------
from time import sleep
from math import sqrt, atan
class i2c(object):
# MPU6050内部地址,需查手册获得
def __init__(self):
# raspberry pi A is 0,B is 1
self.pi = 1
# iic address of MCP23017
# 上面测试时候的地址
self.address = 0x68
#
import smbus
self.bus = smbus.SMBus(self.pi)
# 电源管理,正常启动接触休眠值0x00
self.bus.write_byte_data(self.address, 0x6B, 0x00)
# 陀螺仪采样率,典型值:0x07(125Hz)
self.bus.write_byte_data(self.address, 0x19, 0x07)
# 低通滤波频率,典型值:0x06(5Hz)
self.bus.write_byte_data(self.address, 0x1A, 0x06)
# 陀螺仪自检及测量范围,典型值:0x18(不自检,2000deg/s)
self.bus.write_byte_data(self.address, 0x1B, 0x18)
# 加速计自检、测量范围及高通滤波频率,典型值:0x01(不自检,2G,5Hz)
self.bus.write_byte_data(self.address, 0x1C, 0x01)
# 3轴的加速度
def read_accel(self):
# x轴
self.accel_x_h = self.bus.read_byte_data(self.address, 0x3B)
self.accel_x_l = self.bus.read_byte_data(self.address, 0x3C)
# y轴
self.accel_y_h = self.bus.read_byte_data(self.address, 0x3D)
self.accel_y_l = self.bus.read_byte_data(self.address, 0x3E)
# z轴
self.accel_z_h = self.bus.read_byte_data(self.address, 0x3E)
self.accel_z_l = self.bus.read_byte_data(self.address, 0x3F)
return self.accel_x_h, self.accel_x_l, \
self.accel_y_h, self.accel_y_l, \
self.accel_z_h, self.accel_z_l, \
# 陀螺仪3轴角加速度,每秒多少度
def read_gyro(self):
# x轴角速度
self.gyro_x_h = self.bus.read_byte_data(self.address, 0x43)
self.gyro_x_l = self.bus.read_byte_data(self.address, 0x44)
# y轴角速度
self.gyro_y_h = self.bus.read_byte_data(self.address, 0x45)
self.gyro_y_l = self.bus.read_byte_data(self.address, 0x46)
# z轴角速度
self.gyro_z_h = self.bus.read_byte_data(self.address, 0x47)
self.gyro_z_l = self.bus.read_byte_data(self.address, 0x48)
return self.gyro_x_h, self.gyro_x_l, \
self.gyro_y_h, self.gyro_y_l, \
self.gyro_z_h, self.gyro_z_l, \
# 3轴与自然轴角度,参考他人的算法,也不是很明白
def read_nature_axle_angle(self):
# 先开方,然后在算出弧度,最后把弧度转换为角度
# 使用try 防止分母为0
# x轴
tmp = self.accel_x_h/int(sqrt((self.accel_y_h*self.accel_y_h+self.accel_z_h*self.accel_z_h)))
self.x_nature_axle_angle = int(atan(tmp)*1800/3.14)
# y轴
tmp = self.accel_y_h/int(sqrt((self.accel_x_h*self.accel_x_h+self.accel_z_h*self.accel_z_h)))
self.y_nature_axle_angle = int(atan(tmp)*1800/3.14)
# z轴
try:
tmp = int(sqrt((self.accel_x_h*self.accel_x_h+self.accel_y_h*self.accel_y_h)))/self.accel_z_h
except:
pass
self.z_nature_axle_angle = int(atan(tmp)*1800/3.14)
return self.x_nature_axle_angle,self.y_nature_axle_angle, self.z_nature_axle_angle
# 芯片温度
def read_temp(self):
self.temp_out_h = self.bus.read_byte_data(self.address, 0x41)
self.temp_out_l = self.bus.read_byte_data(self.address, 0x42)
return self.temp_out_h, self.temp_out_l
def main():
i = i2c()
while 1:
print i.read_accel()
print i.read_gyro()
print i.read_temp()
print i.read_nature_axle_angle()
print "=" * 20
sleep(0.5)
if __name__ == "__main__":
main()
因为要在管理员环境下运行。命令如下
sudo python iic_python.py
开始收集测试数据。
测试源码
参考
http://wiki.erazor-zone.de/wiki:linux:python:smbus:doc
http://learn.adafruit.com/adafruits-raspberry-pi-lesson-4-gpio-setup/configuring-i2c
http://blog.sina.com.cn/s/blog_8240cbef01018i10.html
http://www.geek-workshop.com/thread-2328-1-1.html